

Hexapod Platform
Платформа Гофа — Стюарта применяется в станкостроении, подводных исследованиях, авиационных спасательных операциях на море, летательных тренажёрах, позиционировании спутниковых антенн, в телескопах и в ортопедической хирургии.
Платформа Гофа — Стюарта применяется в станкостроении, подводных исследованиях, авиационных спасательных операциях на море, летательных тренажёрах, позиционировании спутниковых антенн, в телескопах и в ортопедической хирургии.
Привет!
Несколько месяцев назад я публиковал пост, о своем роботе.
Сейчас я хотел бы поделиться обновлением: недавно я написал клиентское приложение (на питоне) для Steam Deck (игровая консоль).
Теперь роботом можно управлять через WiFi, видеть логи и стрим с камеры.
Исходные коды клиентского и серверного приложений доступны в моем github https://github.com/stanislau-arkhipenka/arr
Привет.
Недавно закончил сборку вот этого робота.
Работает на raspberry pi, управляется контроллером от xbox.
Инструкция по сборке и список комплектующих тут https://zzbot.org/projects/apc-1-hexapod/
Всем привет! Хочу представить вам своего нового робота: АРС (Автономный Робот Спасатель) - это мой концепт, мой взгляд на то, как такой робот мог бы выглядеть, если бы он существовал в реальности. К тому же, мне хотелось создать бота, который бы выглядел так, как они выглядят в книгах, фильмах или играх. По сути, это классический дистанционно управляемый шагающий робот, но с интересным дизайном. Проект находится в открытом доступе, так что его может собрать любой желающий. Страница проекта - тык.

Подробное видео по сборке, в конце которого можно увидеть эту штуку в действии:
Не так давно я уже собирал одного гексапода, о нём можно прочесть здесь:
Шагающий FPV дрон "Скорпион". Часть 2: Настройка и тесты
Новый робот создан на его основе. "АРС" обошёлся мне примерно в 20 000 рублей + филамент для печати деталей, а вот "Скорпион" обойдётся в разы дешевле, т.к. он собран на гораздо более дешёвых сервах.

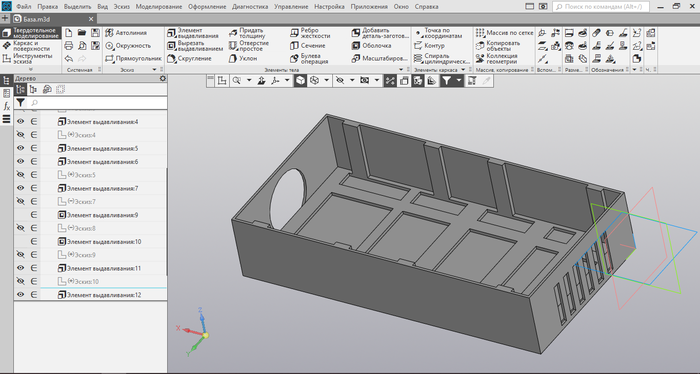
Все 3D модели созданы в КОМПАС-3D Home.
Все пластиковые детали напечатаны на 3D принтере. Я использовал филаменты четырёх типов: угленаполненный нейлон (BFCarbon), смесь поликарбоната и АБС (PC/ABS), резиноподобный филамент (BFGummy) и полупрозрачный Watson.

Все детали из PC/ABS были обработаны наждачной бумагой и окрашены аэрографом.


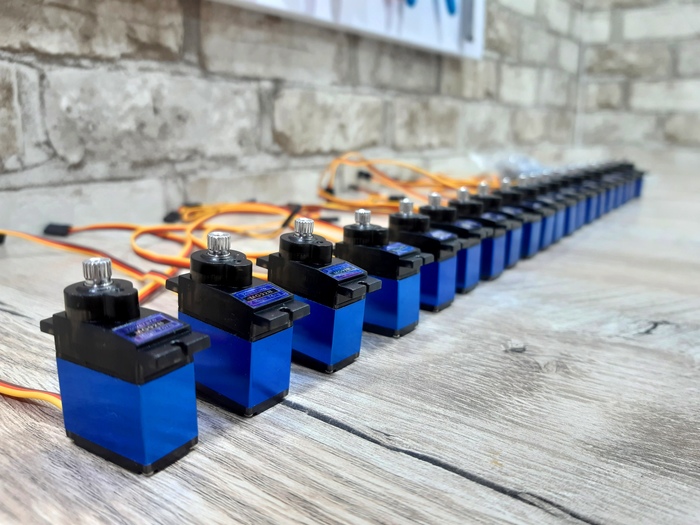
В движение робота приводят 18 оригинальных сервоприводов MG92B, установленных в ногах. Плюс ещё два (MG996R и MG92B) для головы. На них приходится больше половины стоимости всего бота, но они безусловно стоят своих денег: сервы действительно очень живучие и мощные, особенно как для своего размера и веса (каждый весит всего 15 грамм).
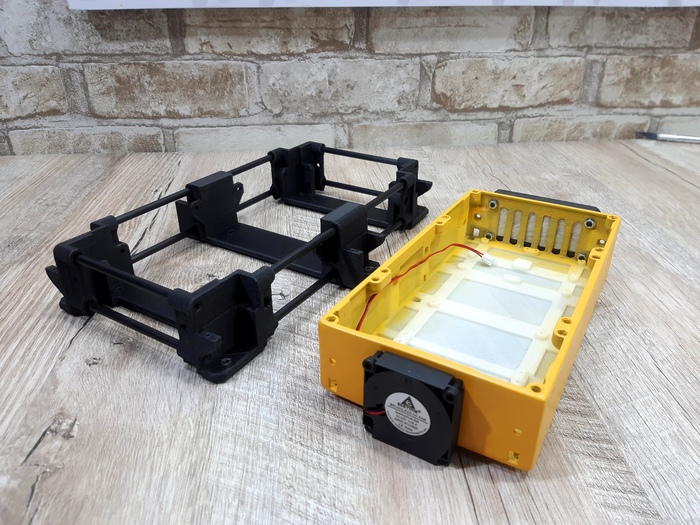
Питается робот от пары Li-ion аккумуляторов формата 21700 соединённых параллельно, суммарная ёмкость составляет 8000 mah. Заряда хватает минимум на 30 минут активной ходьбы в самом быстро режиме, с включенным светом и камерой. Заряжать бота можно зарядкой от смартфона, планшета, от пауэрбанка или даже от компьютера, т.к. здесь установлен типовой модуль зарядки с разъёмом USB Type-C.

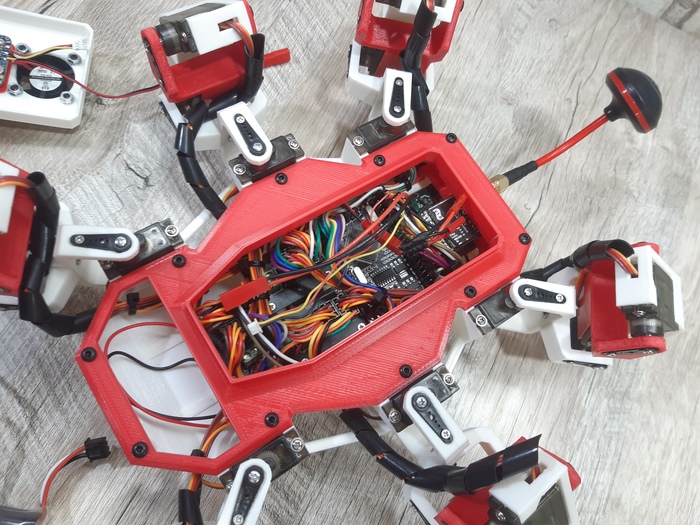
Внешний каркас базы и головы собран на карбоновых трубках. В базе на него действительно ложится нагрузка, а вот на голове - это скорее декоративный элемент.

Хотя мы значительно улучшили прошивку и добавили много нового (подробности в видео) управление пока осталось прежним, потому пришлось снова использовать беспроводной контроллер от PS2. В ближайшем будущем нужно её переписать и прикрутить управление при помощи нормальной дальнобойной аппаратуры, потому что с приёмниками геймпадов часто бывают проблемы, да и радиус действия у них всего метров 10, а это не серьёзно.

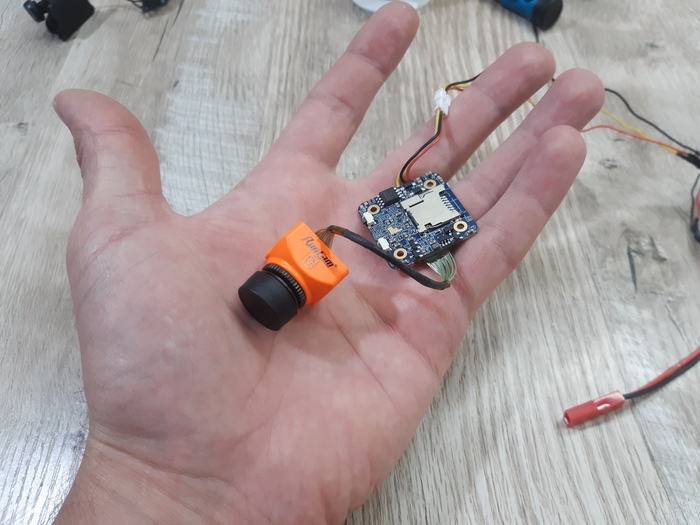
В голове установлена FPV камера RunCam Split 3, которая не только транслирует видео на FPV шлем, но и пишет его на бортовую флешку в FullHD. Фонарик и габариты включаются дистанционно, при необходимости.



Бот весит 1,8 кг. но, не смотря на это, он получился довольно шустрым.
Я очень рад, что наконец-то смог реализовать свою давнюю задумку. Надеюсь эта штука вам понравилась =)
В ближайшее время я возьмусь за проектирование нового бота. Он будет гораздо больше, мощнее и ещё интереснее =)
И ещё несколько фото напоследок:



Два года разработки с 0, вот прям с чистого чертежа в КОМПАС 3Д. Всю электронику, прошивку, программу управления, механику, математику и дизайн - всё сам и всё с нуля. Наконец-то я сделал это - проект достиг версии 1.00. Не буду голословным, результат работы показан на видео. Надеюсь всем понравится :)
Вот тут можно узнать о ходе разработки подробнее. Там есть ссылки на различные этапы разработки.
Всем привет. Недавно я писал о своём новом Гексаподе.

Вот вторая часть видео, в которой я очень подробно рассказал обо всех режимах ходьбы и о настройке прошивки. А в конце вас ждёт небольшой тест - драйв:
Если вкратце, то вот список того, что умеет робот:
У нас тут есть четыре режима ходьбы: Tripod, Tetrapod, Wave, Ripple.
Tripod (Треножник) – Робот переставляет по 3 ноги за раз.
Tetrapod (Четвероногий) – Робот переставляет по две ноги за раз, как Тетрапод (четвероногий)
Wave – Робот переставляет по одной ноге за раз, по очереди, от первой до шестой.
Ripple – Так же по одной ноге за раз, но уже в ином порядке.
Для каждого из этих режимов доступен медленной подрежим ходьбы, при активации которого скорость робота снижается в 3 раза.
Ну и дополнительные возможности:
При активации режима Translate правый стик приводит в движение корпус робота в горизонтальной плоскости, а так же позволяет поднимать и опускать корпус по вертикали левым стиком.
Режим Rotate позволяет вращать корпус по трём осям при помощи правого и левого стиков, а так же поднимать и опускать его по вертикали.
Ещё есть режим фиксации. Можно изменить положение корпуса робота при помощи режимов Rotate или Translate, зафиксировать его, а затем выбрать один из четырёх режимов ходьбы и попробовать ходить в таком виде.
Ещё робот можете махать передними лапами, но этот режим так, для галочки, видимо просто оставалась свободная кнопка.

Прошивка взята вот из ЭТОГО проекта – это отличный большой Гексапод. Автора этого проекта зовут Марк, он проделал большую работу и написал отличный код, а затем выложил в открытый бесплатный доступ, за что надо сказать ему просто Огромное Спасибо. Мне только пришлось разобраться что к чему (не без помощи автора) и настроить прошивку под моего Гексапода, т.к. он отличается от оригинального как по размерам, так и частично по конструкции. В своём видео я изложил всю необходимую информацию о прошивке, так что любой желающий теперь сможет собрать своего робота, желаемых размеров и формы, и настроить эту прошивку для работы с ним.

В целом робот получился очень даже не плохим, особенно как за свои деньги. Без FPV системы эта штука обойдётся примерно в $70 - $80, что очень дёшево, как для радиоуправляемого шагающего робота.
Аккумулятора ёмкостью 850mah хватает на 30 минут ходьбы по ровной поверхности. Из минусов – робот получился не особо быстрым, а так же едва отрывает ноги от поверхности, из за чего цепляется ими даже за мелкие камни и ветки. Всё это я постараюсь исправить уже в следующей версии.
Этот шагающий FPV дрон – это только первый прототип, который был необходим, чтобы помочь мне разобраться в прошивке и посмотреть, как всё это должно работать на практике. Следующая пара роботов будет куда интереснее =)
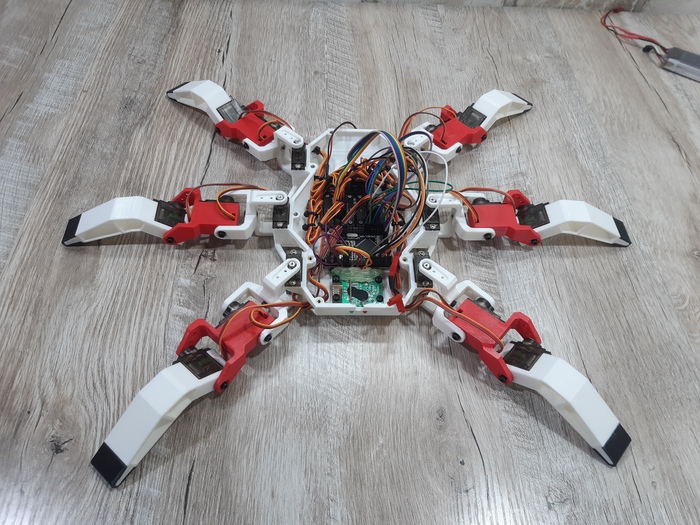
Всем привет! Решил я наконец собрать ещё одного шагающего робота. На этот раз - это Гексапод, управляемый контроллером от PS2. На борту установлена FPV система, которая отправляет картинку на шлем и пишет её на бортовую MicroSD карту.
Ссылка на страницу проекта - тык.

Видео по сборке:
Платой управления является Mega 2560 Pro - уменьшенный аналог Arduino Mega 2560. О прошивке я подробно расскажу в следующей части.

FPV камера RunCam Split 3 с возможностью записи видео и звука на бортовую флешку. Максимальное разрешение - FullHD (1080) при 60 кадрах в секунду. Матрица тут совсем небольшая, потому по качеству видео получается не лучше, чем на бюджетных экшен камерах, но и весит эта штука всего 14 грамм, потому никаких претензий к картинке быть не может =)
Платы распределения питания для сервоприводов нарисованы самостоятельно и заказаны у производителя прототипов печатных плат.
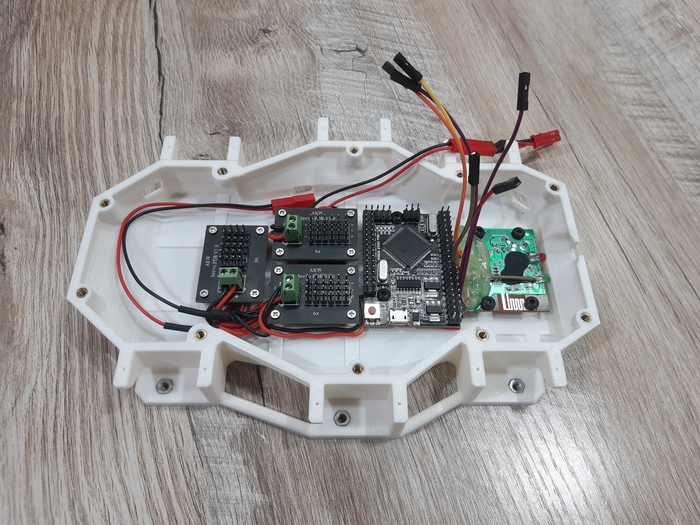
В движение робота приводят 18 сервоприводов MG90.
Для питания используется 2S Lipo аккумулятор на 850mah.








В следующей части видео я подробно расскажу о прошивке, что и где нужно крутить, чтобы настроить её под Гексапода любых (в разумных пределах) размеров и, конечно, устроим небольшой тест -драйв =)
Здравствуйте. Сегодня я бы хотел поделится своим инженерном шедевром - гексаподом SKYNET. Тут не будет технических подробностей и инструкций, просто хочу показать людям свое творение и услышать какую-нибудь критику или предложения. Если вы хотите больше технических подробностей, то я в ходе разработки публикую статьи на хабре (ссылки я оставлю в конце).

Робот собран на базе микроконтроллера SAM3X8E (Arduino Due, только без Arduino - FW написано на чистом C). Возможно вы не поверите, но сделан он из фанеры 3мм с применением лазерной резки. Долго и нудно красил фанеру перманентным маркером (6 штук ушло), но результат порадовал.
Мощные фанерные лапы содержат в себе сервоприводы с моментом 20кг\см, что хватает для причинения болей в случайно попавших во время движения человеческих пальцах (поверьте моему опыту). Без проблем может тащить на себе 4л бутылку с водой и может сходить за вас в магазин (в теории). Собирается это чудо за 8-10 часов с учетом калибровки и настройки.
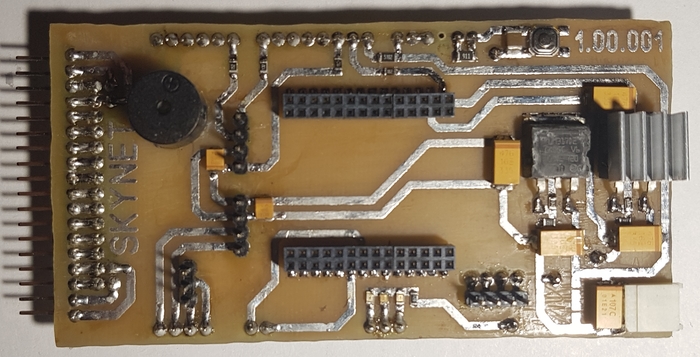
Электроника гексапода состоит из 2 частей: силовая плата для питания микроконтроллера и сервоприводов и плата управления, которая отвечает за коммуникацию по WIFI и подключение внешних сенсоров. Все печатные платы проектировались, разводились и изготавливались в домашних условиях своими руками (все они двухсторонние). Ниже на картинке плата управления. Она вставляется в Arduino Due, а та уже прикручивается к корпусу.
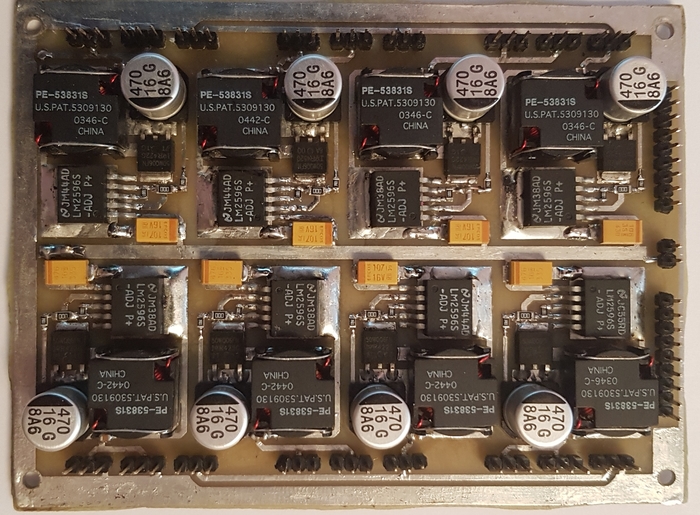
Сердце гексапода - DC-DC понижающий преобразователь 12V - 6V на базе 8 LM2596S. Максимальный выходной ток в 24A позволяет подключать мощные приводы, при этом запас по току остается довольно большой. КПД преобразователя 85% при входном напряжении 12V и максимальной нагрузке.
И конечно же немного видео.
Проект является открытым и активно развивается. Исходные коды прошивки, программ и чертежи доступны на GitHub:
- Прошивка (Atmel Studio): https://github.com/NeoProg2013/Skynet_firmware
- Программа управления (Qt Creator): https://github.com/NeoProg2013/Skynet_control
- Печатные платы (Sprint Layout): https://github.com/NeoProg2013/Skynet_PCB
- Чертежи (КОМПАС 3D V16): https://github.com/NeoProg2013/Skynet_blueprint
- Программа конфигурации (Qt Creator): https://github.com/NeoProg2013/Skynet_setup
Технические подробности (хабр):
- Часть 1: https://habr.com/ru/post/424867/
- Часть 2: https://habr.com/ru/post/424905/
- Часть 3: https://habr.com/ru/post/436748/
- Часть 4: https://habr.com/ru/post/444070/
- Часть 5: https://habr.com/ru/post/448058/
Если у кого-то будут вопросы или проблемы по сборке (если вы вдруг захотите), я буду рад на них ответить.
Баянометр ругался на кривые деревья :)



