Про наш космический аппарат и проект в целом
Всем привет, меня зовут Роман, я аспирант и руководитель команды разработчиков космического аппарата.
В этом посте я хочу рассказать про наш проект.
Сразу хочу сказать, что мы еще в самом начале пути, поэтому многие решения в конструкции аппарата могут меняться в дальнейшем.
Суть и цель проекта
Вы когда-нибудь замечали насколько дорого стоят космические аппараты?
Сегодня отечественный космический аппарат может стоить от нескольких десятков, до нескольких сотен миллионов долларов, за рубежом среднюю стоимость можно спокойной умножать на 5-10.
В целом, на это есть множество причин: дороговизна оборудования, испытания, создание макетов (у каждого аппарата есть несколько макетов для разных испытаний, в том числе полная копия для наземной эксплуатации), и самая главная причина (по моему мнению) - ОГРОМНЫЙ ШТАТ сотрудников. По википедии на, например, Решетневе работает 8 тысяч сотрудников, плюс свой завод. Понятно дело, что при заключении контракта с Роскосмосом на очередной "Экспресс" в его конечную стоимость включены все 8 тысяч "нахлебников".
В этом плане, я считаю, что малые команды-разработчиков, а также малые аппараты (например, кубсаты) обладают огромным преимуществом.
Цель нашего проекта - это радикально снизить стоимость космических аппаратов.
Основная идея - использовать коммерчески доступные компоненты.
Т.е. мы не используем, например, электронику космического назначения, а берем аналоги в магазине и адаптируем для применения в космосе. Да, мы не в тупую будем ставить компоненты, а именно адаптировать ее для космоса, чтобы увеличить надежность и в конечном итоге получить сопоставимые сроки эксплуатации - 3-5 лет для кубсатов, и от 10 лет для малых аппаратов (малый аппарат планируется в будущем, масса 250 кг).
У нас два основных пути по обеспечению надежности и работоспособности аппарата: архитектурный и эксплуатационный.
Архитектурный путь - это разработка такой схемы подключения оборудования на аппарате, которая обеспечит заданный уровень надежности на все 5 лет.
Т.е. это простой расчет по ГОСТ. Слабые места, или единые точки отказа с низкой надежностью мы дублируем (к примеру был один компьютер, стало два. Был один гироскоп - стало два).
Эксплуатационный путь - это проведение адаптации и защиты компонентов от космического пространства.
Космос это - радиация, температурные перепады, вакуум, ультрафиолет.
Единственным полноценным методом полноценным методом защиты выступает - гермокорпус.
Все оборудование аппарата помещено в герметичную "коробку" из алюминия (амг6), внутри которого 0,3 атмосферы сухого азота (по давлению и газу пока предварительно, до этого еще не дошли).

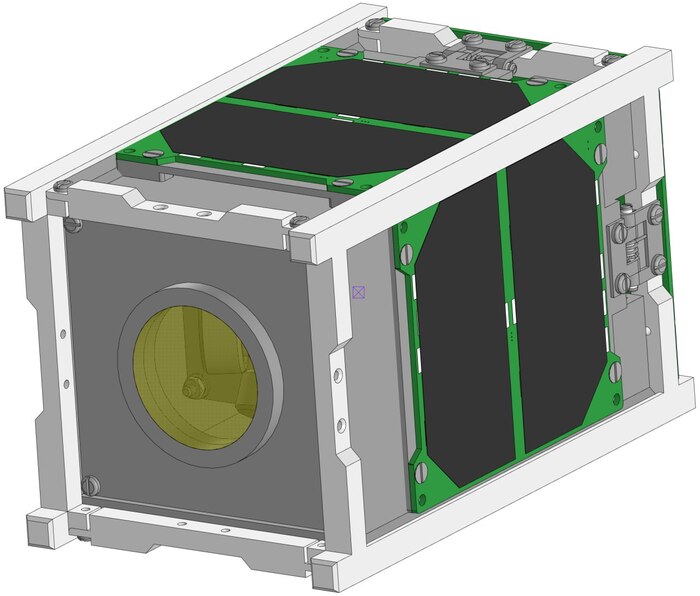
3Д модель гермокорпуса
Сверху и снизу выполнены ребра радиатора - в эти места (изнутри) будут установлены тепловые трубы, для отвода тепла от оборудования.
В конструкции гермокорпуса применяются две крышки, для удобства сборки. Герметизация за счет резиновых уплотнений (предварительно).
Слева и справа мы изначально планировали разместиться имена спонсоров проекта или логотипы спонсоров (ну и наш логотип, конечно же).
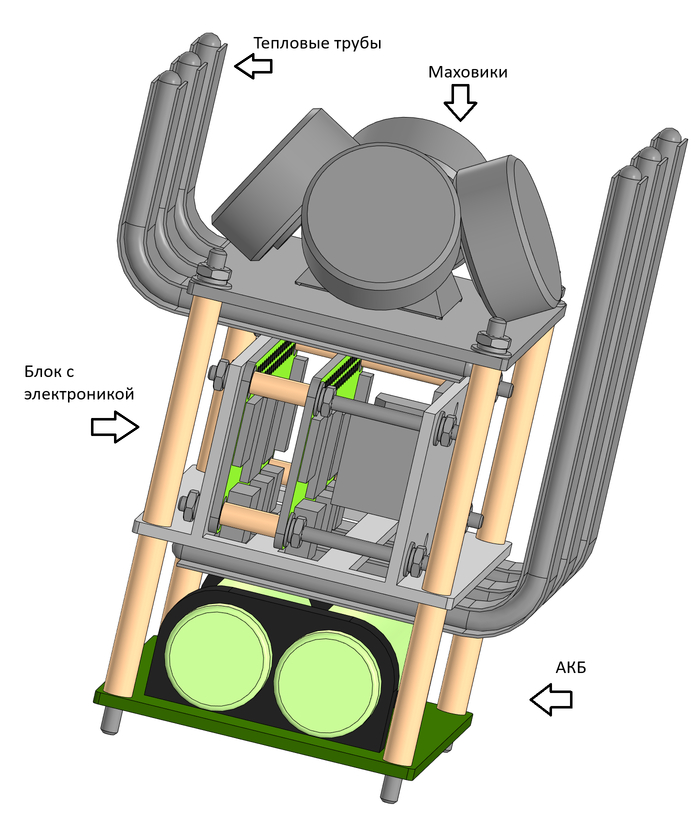
3Д модель оборудования кубсата
Скорее всего блок маховиков и блок с электроникой поменяю местами. Маховики выделяют больше тепла, соответственно и тепловые трубы им нужны больше.
Сейчас я рисую модель 1,5U, для дальнейшего участия в акселераторах, например, от Энергии, но если не будет хватать места, сделаю корпус длиннее до 2-3U.
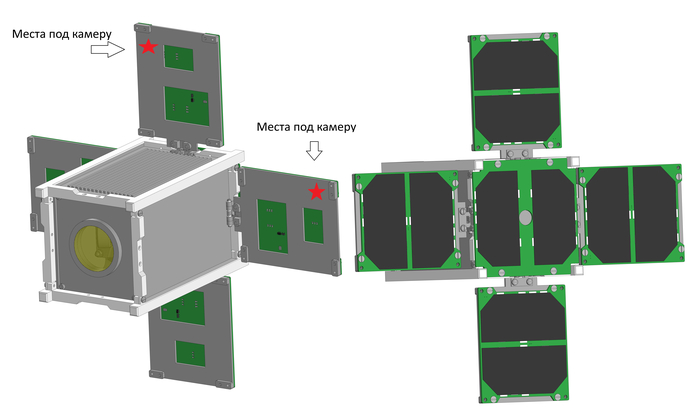
В этом варианте конструкции предусмотрены только камеры, без крупной оптики. В гермокорпусе будет хорошая камера, которую мы планируем использовать далее - GigE, 2/3" CMOS, 2.3 МП или аналоги.
Плюс две камеры на крыльях для обзора спутника. Они будут крепиться за солнечными панелями.
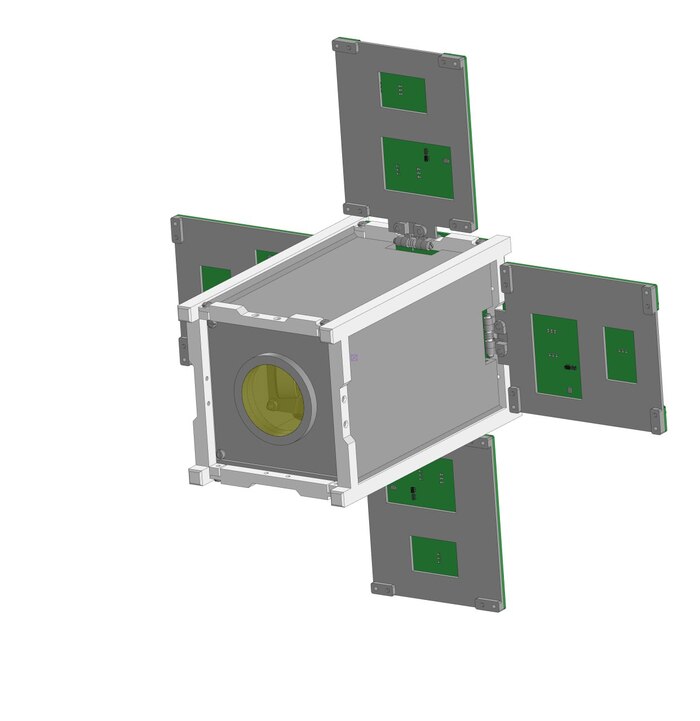
3Д модель кубсата 1,5U
Раскладываемые панели нам нужны для отработки и дальнейшего использования на более крупных аппаратах.
В целом, такой маленький аппарат ограничен в своих возможностях. Все 5 панелей в лучшем случае дадут нам 10 Вт энергии, а с учетом освещенности и того меньше. Поэтому поставить какое-то серьезное оборудование мы не сможем.
Сейчас список такой: Raspberry Pi Zero 2 W как основной вычислительный модуль, STM32 микроконтроллер для управления, CAN шина для подключения датчиков и тп. блок маховиков, магнитные катушки (в планах), датчик Солнца (самодельный - камера + фильтр), по 6 датчиков температуры и дозы, 3 камеры, 2 модуля связи ( на модели не показаны), блок АКБ на 11,5 Вт*ч, приемник GPS/ГЛОНАСС, магнитометр, акселерометр + гироскоп (одна плата), нагреватель, чтобы АКБ не замерзла в тени Земли.
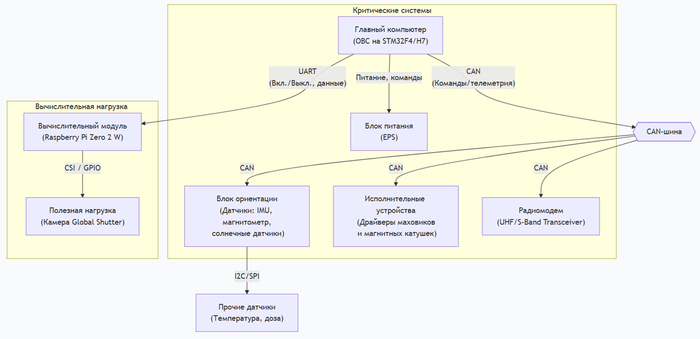
Схема подключения от дипсик
Главная проблема, что по образованию я двигателист - ракетчик, и по сути, космические аппараты это что-то новое для меня. Но в целом мне очень нравится, это очень интересная работа.
По такому малышу понятно, но у нас изначально планировались 6U кубсаты. Главное их отличие, что туда помещается хорошая оптика - телескоп с диаметром зеркала 60 мм и 350 мм фокусным расстоянием.
В 6U помещается два набора оптики: для съемки в видимом свете и для съемки в ближнем ИК. Таким образом, кроме основной камеры потребуется еще ИК сенсор стоимостью около 1 млн рублей (нашел на али).
Расчетные параметры такие: для высотки орбиты 500 км: 6,5 м/пиксель в видимом свете и 11,5 м/пиксель в ближнем ИК.
Параметры для других аппаратов в таблице ниже.
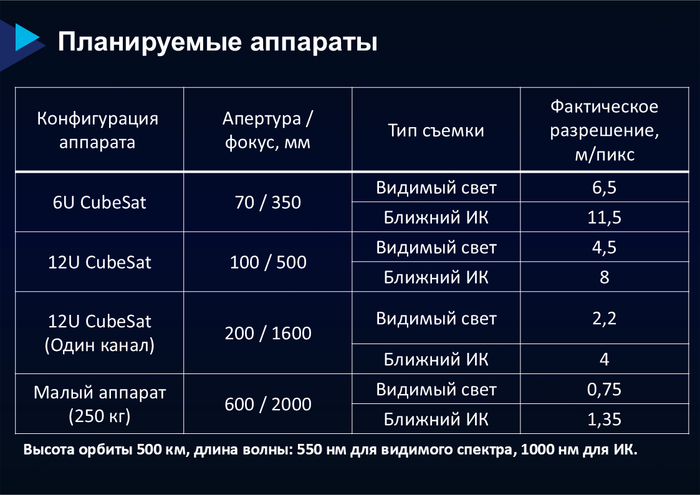
Расчетные параметры наших аппаратов
Космическая магистраль
Кроме того, наши аппараты это не просто ДЗЗ, мы хотим реализовать идею локального спутникового интернета.
В чем основная проблема ?
Сейчас связь с аппаратом устанавливается на 10-15 минут за один виток. Виток - 90 минут. Остальное время аппарат летает "сам по себе". Дать команды, получить телеметрию, получить данные мы можем только за эти 10-15 минут.
Это существенная проблема, поэтому мы хотим добавить набор антенн (для более крупных аппаратов, от 6U) и передавать данные по цепочке.
Мы назвали этот проект "Космическая магистраль".

Схема космически магистрали
Именно поэтому изначально мы хотели сделать сразу 4 аппарата. Имея 4 аппарата мы смогли бы испытать передачу данных между ними и ЦУП. Данные не всегда должны передаваться по цепочке, из-за разности наклонений, высот и углов орбит, данные должны передаваться и последовательно и параллельно.
По планам после тестов к нашей магистрали могут подключаться любые другие аппараты и получать при этом постоянную связь. Данные из ЦУП отправлялись бы сразу в интернет-облако.
Чтобы получить постоянную связь БЕЗ слепых пятен вообще, нужно будет примерно 15 аппаратов.
Опять же исходя из бюджета и размера аппарата характеристики будут меняться. Если денег будет мало, можно поставить УКВ модуль со скорость до 300 кб/с, если будет много, то антенну Х-диапазона со скоростью 250 мб/с, для малого аппарата (который 250 кг) рассматривается лазерная связь со скоростью в десятки ГИГАбит/с.
Далее мы нашу идею доработали.

Космическая магистраль и дроны
По аналогии со старлинком, на дрон можно поставить наш приемник-передатчик и тем самым получив стабильную связь в любым районах Земли или, например, Марса.
На это нас, в том числе, вдохновил Инжинюити (Марсианский вертолет). Зачем ездить по Земле, если можно летать ?
В любом случае работа идет, хоть и медленно, но все же идет.
На данный момент это в целом все.
Спасибо тем, кто прочитал =)